微云全息(NASDAQ:HOLO)点云降噪算法为单光子激光雷达数据进行实时3D全息重建
微云全息(NASDAQ:HOLO)点云降噪算法为单光子激光雷达数据进行实时3D全息重建
微云全息(NASDAQ:HOLO)在全息激光雷达的点云算法领域一直处于行业领先地位,微云全息服务众多知名的新能源汽车企业以及ADAS汽车控制系统集成商或设备研发企业。随着汽车制造商和领先的移动技术领域,寻求全面的数字感知解决方案以加速和规模化其自动驾驶技术的应用。微云全息全息激光雷达利用这一市场趋势为大规模自动驾驶量产提供优秀的解决方案。
3D全息激光雷达点云成像技术不断取得快速的发展,但是目前的现有的计算成像算法通常要么太慢,要么不够精细或者需要基于极高的算力,甚至最近的基于卷积神经网络(CNN)估计场景深度的算法,训练后都难以达到实时的要求。微云全息提出了一种新的算法结构,以满足速度、鲁棒性和可扩展性的要求。该算法有效地将目标表面建模为嵌入3D空间中的二维流形。使用计算机图形的点云去噪工具实现的。由此产生的算法可以合并有关观测模型的信息,例如泊松噪声、存在坏点的像素、压缩传感等。同时利用计算机图形的流形建模工具。通过选择大规模并行降噪器,所提出的方法每秒可以处理数十帧,微云全息的基于单光子激光雷达的算法,包含深度更新、强度更新和背景更新三个主要步骤。
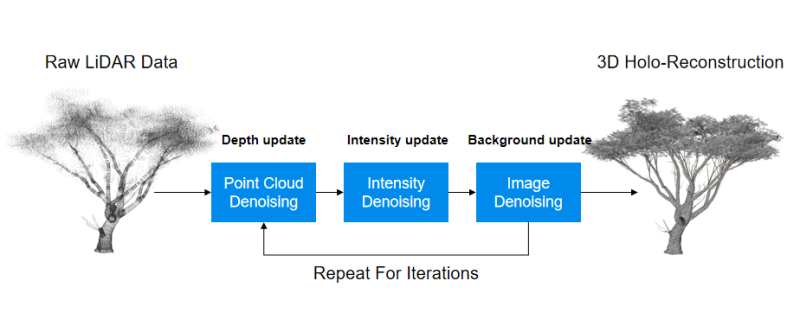
深度更新:对深度变量采取渐变步骤与点云使用点集曲面算法进行去噪,在三维全息空间的坐标系中运行。对光滑的连续曲面进行适配,适配由内核控制。与传统的深度图像降噪相比,微云全息点云降噪可以处理每个像素任意数量的表面,而不管激光雷达系统的像素格式如何。此外,所有3D点进行并行处理,使得运算时间非常短。
强度更新:在此更新中,渐变步骤是针对单个像素在3D全息空间中的坐标进行降噪。通过这种方式,只需要考虑同一表面内点之间的相关性。使用每个点的最近邻的低通滤波器。此步骤仅考虑局部相关性,并且并行处理所有点。在去噪步骤之后,我们去除强度低于给定阈值的点,该阈值设置为最小允许反射率。
背景更新:与强度和深度更新类似的方式,取决于激光雷达系统的特性。在双基光栅扫描系统中,激光源和单光子探测器不是同轴的,背景计数不一定在空间上相关。因此,不会对背景应用空间规律化,在这种情况下,降噪操作简化为恒等式。在单站光栅扫描系统和激光雷达阵列中,背景检测类似于被动图像。在这种情况下,空间规律化有助于改进估计值。因此,我们用现成的图像去噪算法,其计算复杂度较低。
微云全息这种新的计算框架,基于从单光子数据进行实时三维全息场景的重建。通过将统计模型与计算机图形的高度可扩展的计算工具相结合,可进行复杂户外场景的3D重建,处理时间约为10-20毫秒。微云全息所提出的方法可以处理每个像素中未知数量的表面,该算法允许通过复杂场景的进行目标检测和成像。这能够对复杂的移动场景进行稳定的实时目标重建,为实现3D全息成像应用的视频速率单光子激光雷达技术铺平了道路。
3D全息场景的重建可以应用在多个重要领域,例如自主导航、环境检测和其他计算机视觉任务。3D全息场景重建拥有多个技术领域,如RGB-D传感器获取发射率成像,立体成像或全波形激光雷达3D全息成像等。与之相比,微云全息单光子激光雷达技术方案有几个突出的优势,微云全息单光子激光雷达功率低灵敏度高是安全的激光光源,在高散射的水下环境或者极端大雾环境下已经实现了高分率三维全息图像的重建。
微云全息在全息激光雷达的点云算法领域一直处于行业领先地位,微云全息服务众多知名的新能源汽车企业以及ADAS汽车控制系统集成商或设备研发企业。随着汽车制造商和领先的移动技术领域,寻求全面的数字感知解决方案以加速和规模化其自动驾驶技术的应用。微云全息全息激光雷达利用这一市场趋势为大规模自动驾驶量产提供优秀的解决方案。
相关文章
- 2K 100+FPS展现超凡性能!耕升 RTX 4070搭配DLSS 3实现流畅光追游戏体验
- 技嘉科技推出GeForce RTX 4070系列显卡
- 美学与性能的完美结合!耕升 GeForce RTX 4070系列GPU全新来袭
- “绿源式”自主创新获权威认可,液冷集成电机加冕科学技术进步一等奖
- 爱企查显示,麦趣尔新增被执行22万元
- 0元购安排!腾讯ROG游戏手机7系列首发大礼包全攻略
- MAXHUB携全新产品亮相ISLE展会,智慧会议备受青睐
- 中国企业“要出海”,Tiktok为何成为香饽饽?
- 便携大屏带来高质量移动办公体验 三星Galaxy Z Fold4热销中
- 数字创新赋能中小企业发展 中国中小商业企业协会数字创新专业委员会正式挂牌
- 腾讯多媒体实验室参与机器视频编解码标准研究,迈向视频技术探索新纪元
- 每分钟都有三个欧洲家庭选择!海信洗衣机以高“品质”赢得市场
- 有颜有实力的“六边形战士”,大眼橙X7D Pro树立轻薄旗舰投影仪新标杆
- 如临其境,重塑感官“芯”境界 --LG OLED C3系列全新升级上市
- 受全球半导体市场供应紧张影响 台积电一季度营收未达预期
- 电视机顶盒这些功能你会了吗?电视盒子实用小技巧你知道几个?
系统下载排行榜71011xp
番茄花园Win7 64位推荐旗舰版 V2021.05
2深度技术Win7 64位豪华旗舰版 V2021.07
3番茄花园Win7 64位旗舰激活版 V2021.07
4带USB3.0驱动Win7镜像 V2021
5系统之家 Ghost Win7 64位 旗舰激活版 V2021.11
6萝卜家园Win7 64位旗舰纯净版 V2021.08
7技术员联盟Win7 64位旗舰激活版 V2021.09
8雨林木风Win7 SP1 64位旗舰版 V2021.05
9萝卜家园Ghost Win7 64位极速装机版 V2021.04
10技术员联盟Win7 64位完美装机版 V2021.04
深度技术Win10 64位优化专业版 V2021.06
2深度技术Win10系统 最新精简版 V2021.09
3Win10超级精简版 V2021
4Win10完整版原版镜像 V2021
5风林火山Win10 21H1 64位专业版 V2021.06
6Win10光盘镜像文件 V2021
7深度技术 Ghost Win10 64位 专业稳定版 V2021.11
8技术员联盟Ghost Win10 64位正式版 V2021.10
9Win10 21H1 Build 19043.1320 官方正式版
10技术员联盟Win10 64位永久激活版镜像 V2021.07
系统之家 Ghost Win11 64位 官方正式版 V2021.11
2Win11PE网络纯净版 V2021
3系统之家Ghost Win11 64位专业版 V2021.10
4Win11官网纯净版 V2021.10
5Win11 RTM版镜像 V2021
6番茄花园Win11系统64位 V2021.09 极速专业版
7Win11专业版原版镜像ISO V2021
8Win11官方中文正式版 V2021
9Win11 22494.1000预览版 V2021.11
10番茄花园Win11 64位极速优化版 V2021.08
深度技术Windows XP SP3 稳定专业版 V2021.08
2雨林木风Ghost XP Sp3纯净版 V2021.08
3萝卜家园WindowsXP Sp3专业版 V2021.06
4雨林木风WindowsXP Sp3专业版 V2021.06
5技术员联盟Windows XP SP3极速专业版 V2021.07
6风林火山Ghost XP Sp3纯净版 V2021.08
7萝卜家园 Windows Sp3 XP 经典版 V2021.04
8番茄花园WindowsXP Sp3专业版 V2021.05
9电脑公司WindowsXP Sp3专业版 V2021.05
10番茄花园 GHOST XP SP3 纯净专业版 V2021.03
热门教程 更多+
装机必备 更多+
重装教程 更多+
电脑教程专题 更多+